Quando se elege um motor de corrente alternada associado a um conversor de frequência, é importante calcular a eficiência total do conjunto e ver qual o impacto nos custos de consumo de energia.
Introdução
Graças às poupanças energéticas associadas aos conversores de frequência ligados a motores de CA de alta eficiência, os fabricantes destes equipamentos têm podido desenvolver tecnologias e soluções para melhorar, não apenas a eficiência, mas também as instalações do mundo da água. Seguidamente queremos expor, por um lado, as vantagens dos accionamentos e, por outro, as últimas tecnologias e desenvolvimentos da ABB para as aplicações da água.
Benefícios Claros
Uma maior eficiência nos motores pode contribuir para uma poupança energética considerável que, por sua vez, pode fazer reduzir o tempo de amortização da instalação. Por exemplo, cerca de 3% de diferença de eficiência num motor de 90kW, de 92% para 95% pode economizar 15 000€ durante a vida útil do motor. Portanto, em indústrias com um grande número de motores de elevada potência, estas poupanças podem pressupor milhões de euros.
A ABB investiu esforços consideráveis não só no aumento da eficiência dos motores e dos conversores associados, mas também na compreensão da natureza dos factores que afectam a eficiência, de forma a que o utilizador não só veja a sua instalação mas também as vantagens meio-ambientais.
A natureza da eficiência
Eficiência é um termo dos sistemas eléctricos e mecânicos que tem uma definição muito simples:
Eficiência = Potência de saída dividida por potência de entrada.
No entanto, no mundo real da indústria, esta definição tão simples é afectada pela natureza imperfeita das máquinas actuais. A eficiência total depende das perdas no motor e no sistema de controlo. As perdas do motor e do conversor de frequência são térmicas, dissipam-se em forma de calor.
A potência de entrada de um sistema de accionamentos é eléctrica, enquanto que a saída é mecânica. São requeridos conhecimentos mecânicos e eléctricos para o cálculo do total da eficiência de um motor associado a um accionamento.
A potência eléctrica de entrada depende da tensão, da corrente e do factor de potência (ver figura 1). O factor de potência determina que proporção da potência eléctrica total é ‘activa’ e que proporção é ‘reactiva’. A potência activa é a potência mecânica requerida enquanto que a potência reactiva é a potência requerida para realizar a magnetização do próprio motor.
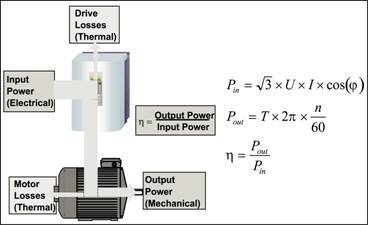
Figura 1: Eficiência num sistema de accionamento.
A potência mecânica, Pout, depende do par requerido, T, e da velocidade de rotação, n. Uma velocidade mais rápida ou um par superior fazem com que a potência necessária seja maior. Isto tem um efeito directo na potência total que o accionamento da rede consome. O conversor de frequência regula a tensão que tem de ser fornecida ao motor, portanto controla directamente a potência no motor enquanto controla o processo.
Eficiência do motor
A eficiência do motor tem um valor tipicamente entre 0.7 e 0.97, dependendo do tamanho do motor e da velocidade. Existem quatro factores diferentes que têm impacto na eficiência do motor:
- Tamanho do motor
- Velocidade do motor
- Carga do motor
- Tipo de controlo
Tamanho do motor
Em geral, os motores pequenos, com uma variação de potência até 1kW, têm uma eficiência pior do que os motores maiores, situando-se as eficiências típicas entre os 70% e os 80%. Os motores de mais de 100kW apresentam eficiências superiores a 95% (Fig.2).
Figura 2: Eficiência típica de diferentes tamanhos de motor
Velocidade do motor
Os motores de CA disponíveis comercialmente têm uma variação de velocidade determinada pelo número de pólos. Geralmente, os de 4 pólos, que correspondem a motores de 15000 rpm, são os mais eficientes devido ao facto de este tipo de motores tender a utilizar a geometria do motor e, além disso, os materiais são melhores do que noutro tipo de motores. Na figura 3, vemos as diferenças nas eficiências para motores de 250kW em diferentes velocidades. Vê-se como para 4 pólos a eficiência é de 96.5, comparativamente com 95.7 de um motor mais lento com a mesma saída.
Figura 3: Eficiências de 4 motores de 250kW e de diferentes velocidades
Carga do motor
Os motores de CA têm o seu pico de eficiência numa variação limitada da sua potência de saída. Nos motores eléctricos, este ponto dá-se com 75% da carga. (Fig.2).
Os dados típicos de catálogo indicam que a eficiência de um motor de 0.75kW pode ter uma redução de cerca de 70 com uma variação de carga entre 55% e 25%. Os motores maiores também são menos eficientes com uma carga reduzida: um motor de 160kW pode perder cerca de 5% de eficiência com 25% da carga, por exemplo.
Tipo de controlo
Existem algumas perdas adicionais induzidas pelo controlo da velocidade. Para entender a natureza destas perdas é importante observar a concepção interna do motor de CA. A figura 4 mostra as perdas típicas num motor de 37kW. Há 4 tipos de perdas: perdas por fricção, perdas resistivas no rotor, perdas no ferro e perdas resistivas no estator. As perdas no estator e no enrolamento do rotor são as mais importantes, seguidas pelas do ferro e das de fricção, que são apenas 10% do total.
Os conversores de frequência com correntes não senoidais podem originar perdas no motor pelos Armónicos e fazer com que as perdas totais cresçam 10%, o que se traduz numa diminuição da eficiência de cerca de 1%.
Figura 4: Perdas típicas num motor de 37kW
Eficiência num conversor de frequência
A comutação eléctrica com transístores é muito eficiente. Por isso, a eficiência de um conversor de frequência é muito elevada, de 0.97 a 0.99. Na figura 5, estão demonstrados 5 cortes típicos de perdas no inversor a carga plena. As perdas que não dependem da carga são aproximadamente 10% e as que dependem da carga situam-se em torno dos 90%. A maior parte destas últimas é gerada no inversor e as restantes no rectificador.
Figura 5: Perdas no inversor a carga plena
Simplificando os cálculos
A ABB recolheu, na sua divisão de accionamentos, o conhecimento da parte do motor e do conversor de frequência para criar uma ferramenta de selecção do sistema ideal para aplicações concretas, tendo em conta o efeito do par constante e do par variável nas perdas dos seus próprios conversores de frequência (Figuras 6 e 7) e a combinação de perdas motor/conversor de frequência (ver Fig.8), que dá uma ideia clara do funcionamento conjunto em baixas condições de carga.
Figura 6: Perdas em conversores de frequência, par, etc., perdas a nominal kVA
Figura 7: Perdas em conversores de frequência, par variável
Figura 8: Eficiência de um motor 75 kW + ACS 800, eficiência média à volta de 95%
Os engenheiros de aplicações podem utilizar esta informação para o cálculo de eficiências, de poupança energética e para o cálculo da amortização de uma instalação.
Novos desenvolvimentos para o segmento da água
Tendo em conta que cerca de 65% do consumo eléctrico se deve a motores da indústria, de que 60% se deve a aplicações no mundo da água, é fácil observar o porquê do desenvolvimento de software e aplicações específicas em conversores de frequência para o segmento da água.
Vantagens do conversor de frequência em bombas.
Dadas as vantagens, do ponto de vista energético, da utilização de conversores de frequência em sistemas de bombas, também podemos apreciar vantagens mecânicas na instalação, tais como:
- Eliminação do golpe de aríete
- Possibilidade de trabalhar no ponto de máxima eficiência da bomba
- Menor desgaste da instalação
- Melhor controlo da variável (seja pressão, caudal, nível...)
- Menor custo de manutenção
- Possibilidade de integrar o controlo da estação no conversor de frequência, redução de custos
- Optimização das condutas
- E uma série de funções associadas e incorporadas em conversores de frequência, como o ACS800 da ABB. Estas funções são:
Controlo Multibomba
Utiliza-se quando várias bombas funcionam na mesma parte do sistema e o caudal requerido varia. Com o controlo Multibomba, cada motor é controlado por um conversor de frequência. Quando o mestre alcança 100% de frequência, o conversor seguinte arranca como novo mestre.
Figura 9: Cada conversor controla um motor. No entanto, um deles tem sempre o controlo de toda a instalação
Outra possibilidade com este mesmo software é a de controlar, ao mesmo tempo, a velocidade de todas as bombas, de forma a que toda a instalação aumente e reduza a velocidade em função das necessidades de pressão, nível ou caudal.
Controlo de nível
Concebido para aplicações de águas sujas. A lógica de controlo de nível fica integrada no conversor. Cada motor é controlado por um conversor, sem contactores nem manobra associada. O nível de água é a variável controlada pelo transdutor e pode ser usado para controlo de esvaziamento ou de enchimento de tanques de armazenamento.
Figura 10: Controlo de nível com conversores
Função anti-obstrução
Trata-se de uma função para a prevenção da obstrução na bomba. Pode ser usada como parte da manutenção preventiva ou da limpeza da bomba em estado de congestão. Dispõe de diferentes condições programáveis para a sua actuação:
- )
- Arranca se o nível de intensidade ultrapassar um limite pré-estabelecido que indique uma possível obstrução
- Por tempo de funcionamento
- Por entrada digital
Função de cálculo de caudal
O cálculo baseia-se nas características da bomba e na medida da pressão dentro da variável de funcionamento normal da mesma. É um cálculo independente do fabricante da bomba e o objectivo principal é substituir o caudalímetro, os valores de desvio ± 5…10% dando sinais actuais para caudal instantâneo e caudal total acumulado.
Figura 11: O cálculo baseia-se na equação de Bernouilli.
Além destas funções, também se integram outras, como a possibilidade de adormecer a bomba quando o consumo é reduzido, ou a prioridade de bombas para equilibrar o desgaste da instalação. Tudo isso para um segmento, o da água, que continua a ser o motor que impulsiona tecnologicamente o desenvolvimento dos conversores de frequência e as melhorias na eficiência dos sistemas de accionamentos.